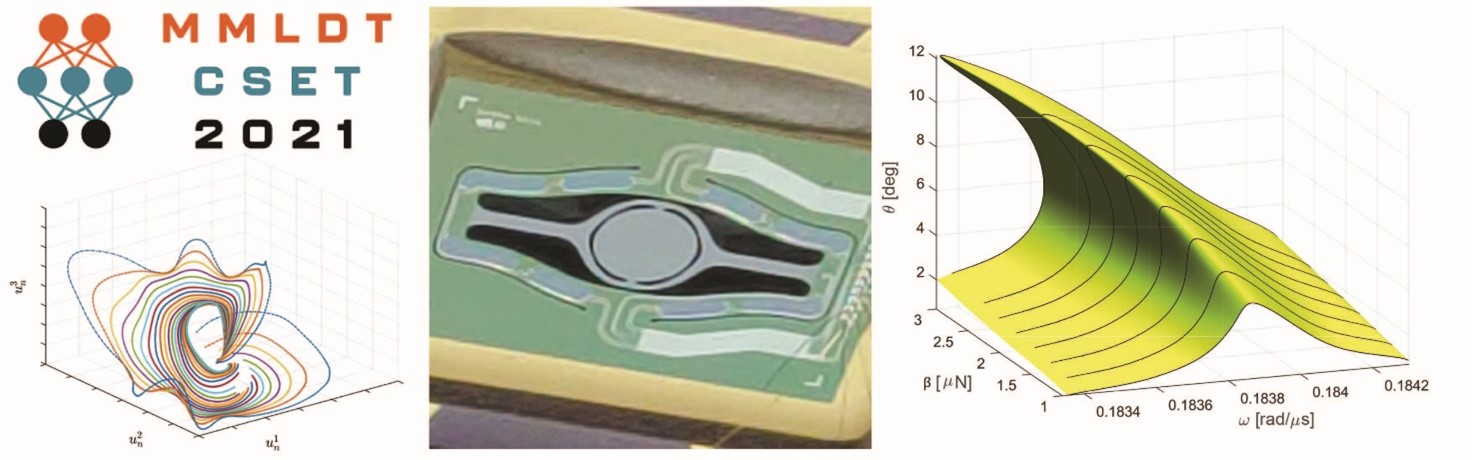
With our colleagues from DMAT Polimi, we propose non-intrusive deep learning-based reduced order models (DL-ROM) capable of capturing the complex dynamics of mechanical systems showing inertia and geometric nonlinearities.
A convolutional autoencoder is employed to map the system response onto a low-dimensional representation and, in parallel, to model the reduced nonlinear trial manifold. The system dynamics on the manifold is described by means of a deep feedforward neural network that is trained together with the autoencoder. By comparing the different computational costs, we discuss the impressive gain in performance and show that the DL-ROM truly represents a real-time tool which can be profitably and efficiently employed in complex system-level simulation procedures for design and optimization purposes.
S. Fresca, G. Gobat, P. Fedeli, A Frangi, A Manzoni, Deep learning-based reduced order models for the real-time simulation of the nonlinear dynamics of microstructures, International Journal for Numerical Methods in Engineering 123 (20), 4749-4777, 2022
S. Fresca, G. Gobat, A. Manzoni, A Frangi
Deep learning-based reduced-order models for Micro-Electro-Mechanical systems
Mechanistic Machine Learning and Digital Twins for Computational Science, Engineering & Technology MMLDT -CSET 2021, Keynote lecture